קטגוריות: חשמלאים מתחילים, מנועים חשמליים ויישומם
מספר צפיות: 8782
הערות לכתבה: 0
סיווג מוטורי
בהתאם למטרה, על מצבי ההפעלה הצפויים והתנאים, על סוג אספקת החשמל וכו ', ניתן לסווג את כל המנועים החשמליים על פי מספר פרמטרים: לפי העיקרון של השגת רגע ההפעלה, על ידי שיטת ההפעלה, על ידי אופי זרם האספקה, על ידי שיטת בקרת פאזות, על ידי סוג עירור וכו '. הבה נבחן את הסיווג של מנועים חשמליים ביתר פירוט.

התרחשות מומנט
מומנט במנועים חשמליים ניתן להשיג באחת משתי דרכים: על ידי העיקרון של היסטריה מגנטית או מגנטואלקטרי גרידא. היסטרזיס מוטורי מקבל מומנט דרך ההיסטרזה במהלך היפוך המגנטציה של רוטור מוצק מגנטית, בעוד מנוע מגנטואלקטרי מומנט הוא תוצאה של אינטראקציה של הקטבים המגנטיים המפורשים של הרוטור והסטטור.

כיום, מנועים מגנטואלקטריים מהווים בצדק את החלק הארי של השפע הכולל של מנועים חשמליים המשמשים בכל כך הרבה תחומים. הם מחולקים לפי אופי אספקת הזרם ל:
-
מנועי DC
-
מנועי AC
-
מנועים אוניברסליים.
שלא כמו מנוע מגנטואלקטרי, מותר לבצע את המגנטציה של הרוטור ביחס לצירים הגיאומטריים שלו במנוע ההיסטריזה, ותכונה ספציפית זו אינה מאפשרת להרחיב את החוקים הכלליים של המרה מגנטואלקטרית למצב הפעולה הסינכרוני של מנוע ההיסטרזה.
צפו - התקן ועקרון הפעולה של המנוע החשמלי הפשוט ביותר ו איך להכין מנוע חשמלי פשוט תוך 10 דקות

סיווג מוטורי
מנועי DC

במנוע המונע על ידי זרם ישר, המנוע עצמו אחראי על מעבר השלבים. המשמעות היא שלמרות שזרם ישיר מסופק למכונה החשמלית, בכל זאת, עקב פעולת המנגנונים הפנימיים של המכשיר, השדה המגנטי מתגלה כמי שמצליח לשמור על מומנט הרוטור (כאילו זרם חילופי פועל במפתל הסטטור).

המכשיר והפעלת מנוע DC: 1 - עוגן, 2 - פיר, 3 - צלחות אספן, 4 - מכלול מברשות, 5 - מעגל מגנטי צבאי, 6 - מעגל מגנטי משרן, 7 - פיתולי שדה, 8 - גוף משרן, 9 - מכסי צד 10 - מאוורר, 11 רגל, 12 - מיסבים.
מנוע DC כולל חלק קבוע הנקרא משרן וחלק נע שנקרא עוגן. בהתאם לעיצוב, ניתן לאתר מגנטים קבועים על המשרן שעל המשרן, מה שמפשט את העיצוב, אך לא מאפשר לך להתאים את השטף המגנטי של המנוע, ומשפיע על מהירותו.
בשיטה של יצירת שדה מגנטי נע, מנועי DC מתחלקים ל:
-
שסתום (ללא מברשות)
-
אספן.
למנועים ללא מברשות יש מהפכים אלקטרוניים בעיצובם, המבצעים מיתוג פאזי. מנועי אספנים מצוידים באופן מסורתי יחידות אספן מברשות, אשר מיועדים לסנכרן מכנית גרידא את כוחם של פיתולי המנוע עם סיבוב חלקיו הנעים.
ריגוש של מנועי אספן

על פי שיטת ההתרגשות, מנועי אספן הם מהסוגים הבאים: עם עירור עצמאי מגנטים קבועים או מאלקטרומגנטים, או עם עירור עצמי. מנועי עירור מגנט קבוע מכילים מגנטים על הרוטור.למנועים הנרגשים מעצמם יש עוגן מיוחד המתפתל על הרוטור, אותו ניתן לחבר במקביל, בסדרה או לערבב עם סלילת עירור מיוחדת.
מנוע אדווה
מנוע זרם פועם דומה למנוע DC. ההבדל נעוץ בנוכחות תוספות מרופדות על הליבה, כמו גם מוטות מרופדים נוספים. בנוסף, יש למנוע זרם אדווה פיצוי. מנועים כאלה משמשים בקטר חשמלי, שם הם בדרך כלל מופעלים מיישר זרם חילופין.
מנוע AC
מנועי זרם חילופין, כפי שהשם מרמז, מופעלים על ידי זרם חילופין. הם סינכרוניים ואסינכרוניים.
עבור מנועי AC AC סינכרוניים, השדה המגנטי של הסטטור נע באותה מהירות זוויתית של הרוטור, בעוד שלמנועים אסינכרוניים תמיד יש פיגור מסוים (המאופיין בערך החלקה s) - נראה כי השדה המגנטי של הסטטור בתנועתו מקדים את הרוטור, שבתורו תמיד מבקש להדביק אותו.
מנועים סינכרוניים בעלי עוצמה גבוהה (בהספק של מאות קילוואט) יש פיתולי שדה על הרוטור. הרוטורים של מנועים סינכרוניים פחות חזקים מצוידים במגנטים קבועים, המהווים את הקטבים. מנועי ההיסטרזה הם גם, באופן עקרוני, סינכרוניים.
מנועי צעד - מדובר בקטגוריה מיוחדת של מנועים סינכרוניים עם שליטה דיוק גבוהה במהירות הסיבוב, עד ספירת צעדים נפרדים.
מנועי סילון סינכרוני שסתום מופעלים באמצעות מהפך.ראה נושא זה:מנועי סילון סינכרוניים מודרניים

מנועי AC AC אסינכרוניים נבדלים על ידי העובדה שמהירות הסיבוב הזוויתית שלהם של הרוטור היא תמיד פחות ממהירות הסיבוב הזוויתית של השדה המגנטי של הסטטור. מנועי אינדוקציה הם שלב אחד (עם פיתול מתחיל), דו-פאזי (מנוע קבלים חל גם עליהם), תלת פאזי ורב-שלבי.
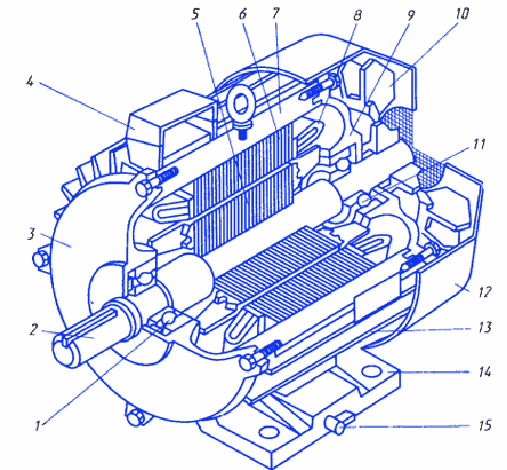
תנוע מנוע אינדוקציה תלת פאזי בכלוב
מנוע חשמלי אסינכרוני מורכב הן מחלק קבוע (סטטורי) והן מחלק נע (רוטור), המוחזקים על ידי מסבים 1 ו -11 המותקנים בכיסויים הצדדיים 3 ו -9. הרוטור מורכב מציר 2, עליו מקבע מעגל מגנטי 5 עם סלילה. סטטור המנוע מורכב מבית 7, אליו מחובר מעגל מגנטי 6. בתוך החריצים של המעגל המגנטי מונחת סלילה תלת פאזית. מכסה תיבת המסוף 4 וכיסוי המגן 12 גם כן מחוברים לדירה.
לרוטור הפאזה יש סלילה תלת פאזית, המתבצעת על ידי סוג המתפתל. חלק מהקצוות של הסלילים מחוברים לנקודת האפס ("כוכב") ואילו אחרים מחוברים לטבעות ההחלקה. מברשות מוטלות על הטבעות ויוצרים קשר הזזה עם הרוטור המתפתל. בעזרת תכנון זה, ניתן לחבר ריאוסטט מתחיל או מכוון לסיבוב הרוטור, המאפשר לשנות את ההתנגדות החשמלית במעגל הרוטור.
ראה גם - ההבדלים בין מנועי אינדוקציה ומנועי DC, הבדלים בין כלוב סנאי ומנועי אינדוקציה נעולים בשלב
מנוע אסינכרוני עם ממיר תדרים לשליטה חלקה על מהירות סיבוב הפיר על ידי שינוי תדר ומתח האספקה:

מנועי מברשת אוניברסליים
מנוע האספן האוניברסלי יכול לפעול לפחות מישירות, אפילו מזרם חילופין (50 הרץ). יש עירור סדרתי, משמש במכשירי חשמל ביתייםכאשר נדרש מהירות סיבוב הגבוהה מהמקסימום עבור מנועי AC רגילים של 3000 סל"ד. ככלל, כוחם של מנועים כאלה אינו עולה על 200 וואט. נפגש שליטת ת'יסטור מהירות מנוע אוניברסלית.
גרסה משופרת של המנוע האוניברסלי היא מנוע סינכרוני עם חיישן מיקום הרוטור, בו תפקיד האספן ממלא על ידי מהפך אלקטרוני.
מאמרים שימושיים אחרים בנושא זה:
סוגי מנועים חשמליים ועקרונות עבודתם
כיצד לקבוע את מהירות הסיבוב של מנוע חשמלי
ראה גם באתר elektrohomepro.com
: